随着物联网与智能交互技术的快速发展,手势控制机器人正成为人机交互领域的热点之一。本文介绍了一种结合Arduino微控制器与射频(RF)集成电路的手势控制机器人系统,该系统能够通过用户手势动作实现机器人的无线远程控制,具有响应迅速、操作直观、扩展性强等优点。
一、系统架构与工作原理
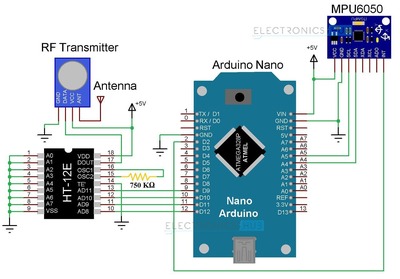
手势控制机器人系统主要由三部分组成:手势采集模块、Arduino控制中心与RF通信模块、机器人执行单元。手势采集模块通常采用加速度计或陀螺仪传感器(如MPU6050)捕捉用户手部动作,通过I2C接口将数据传送至Arduino Nano或Uno控制器。控制器对传感器数据进行滤波与特征提取,识别出预设手势(如上下摆动、左右旋转等),并将其编码为控制指令。随后,指令通过RF集成电路(如NRF24L01)以2.4GHz频段发送至机器人端。机器人本体的接收器通过相同RF模块获取指令,由另一Arduino控制器解析后驱动电机或舵机执行相应动作,如前进、转向或机械臂操作。
二、硬件设计与关键组件
- 手势采集端:采用低功耗Arduino板与MPU6050传感器组合,确保手势检测的实时性与准确性。传感器数据通过卡尔曼滤波算法处理,以消除噪声干扰。
- RF通信模块:NRF24L01芯片作为核心,其具备多频道通信与自动应答功能,有效传输距离可达百米(视环境而定),且功耗较低,适合电池供电的移动应用。
- 机器人执行端:基于Arduino的电机驱动电路(如L298N模块)控制直流电机,结合底盘结构与轮式/履带设计,实现灵活运动。若需复杂操作(如抓取),可扩展舵机模块。
三、软件实现与算法优化
Arduino程序基于C++语言开发,分为发送端与接收端两个部分。发送端代码负责读取传感器数据,通过阈值判断与模式匹配识别手势,例如:
- 手势“上划”对应机器人前进;
- 手势“下划”对应机器人后退;
- 手势“左旋”对应左转。
接收端代码监听RF信号,解析指令后输出PWM信号控制电机转速与方向。为提升系统鲁棒性,引入了校验机制与指令重发策略,避免因信号丢失导致误动作。
四、应用场景与优势分析
此类手势控制机器人可广泛应用于教育演示、智能家居辅助、危险环境探索等领域。其核心优势在于:
- 无需物理接触,操作体验自然直观;
- RF通信抗干扰能力强,适合复杂环境;
- Arduino开源生态支持快速原型开发与功能扩展。
未来,通过集成机器学习算法优化手势识别精度,或结合Wi-Fi/蓝牙模块实现多模态控制,将进一步拓展系统的实用性。
结语
基于Arduino与RF集成电路的手势控制机器人,以其低成本、高灵活性的特点,为人机交互技术提供了可行的实践方案。通过硬件集成与软件优化,该系统不仅降低了开发门槛,也为智能机器人控制领域的创新应用奠定了基础。